
Christopher Amato
reinforcement learning
pomdp
offline learning
mcts
partial observability
actor-critic
bayesian rl
4
presentations
2
number of views
SHORT BIO
Christopher Amato is an assistant professor in the Khoury College of Computer Sciences at Northeastern University. His research is at the intersection of artificial intelligence, machine learning and robotics. Amato currently heads the Lab for Learning and Planning in Robotics, where his team works on planning and reinforcement learning in partially observable and multi-agent/multi-robot systems.
Before joining Northeastern, he worked as a research scientist at Aptima Inc., a research scientist and postdoctoral fellow at MIT, and an assistant professor at the University of New Hampshire. Amato received his bachelor’s from Tufts University and his master’s and doctorate from the University of Massachusetts, Amherst.
Amato is widely published in leading artificial intelligence, machine learning, and robotics conferences. He is the recipient of a best paper prize at AAMAS-14 and was nominated for the best paper at RSS-15, AAAI-19, and AAMAS-21. Amato has also successfully co-organized several tutorials on multi-agent planning and learning and has co-authored a book on the subject.
Presentations

BADDr: Bayes-Adaptive Deep Dropout RL for POMDPs
sammie katt and 3 other authors
Unbiased Asymmetric Reinforcement Learning under Partial Observability
Andrea Baisero and 1 other author
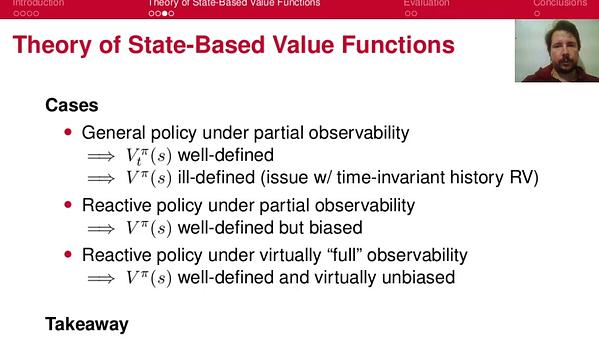
A Deeper Understanding of State-Based Critics in Multi-Agent Reinforcement Learning
Xueguang Lyu and 3 other authors

Stratified Experience Replay: Correcting Multiplicity Bias in Off-Policy Reinforcement Learning
Christopher Amato and 2 other authors