
Alfonso Emilio Gerevini
knowledge acquisition
cognitive robotics
heuristic search
numeric planning
other foundations of planning
routing & scheduling
planning/scheduling and learning
deterministic planning
pddl3
compilation
4
presentations
8
number of views
Presentations
Dealing with Numeric and Metric Time Constraints in PDDL3 via Compilation to Numeric Planning
Luigi Bonassi and 2 other authors
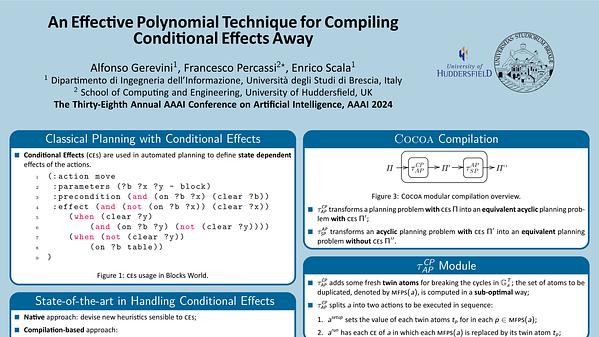
An Effective Polynomial Technique for Compiling Conditional Effects Away
Alfonso Emilio Gerevini and 2 other authors
Planning for Learning Object Properties
Leonardo Lamanna and 6 other authors

On-Line Learning of Planning Domains from Sensor Data in PAL: Scaling up to Large State Spaces
Leonardo Lamanna and 4 other authors