Premium content
Access to this content requires a subscription. You must be a premium user to view this content.

Would you like to see your presentation here, made available to a global audience of researchers?
Add your own presentation or have us affordably record your next conference.
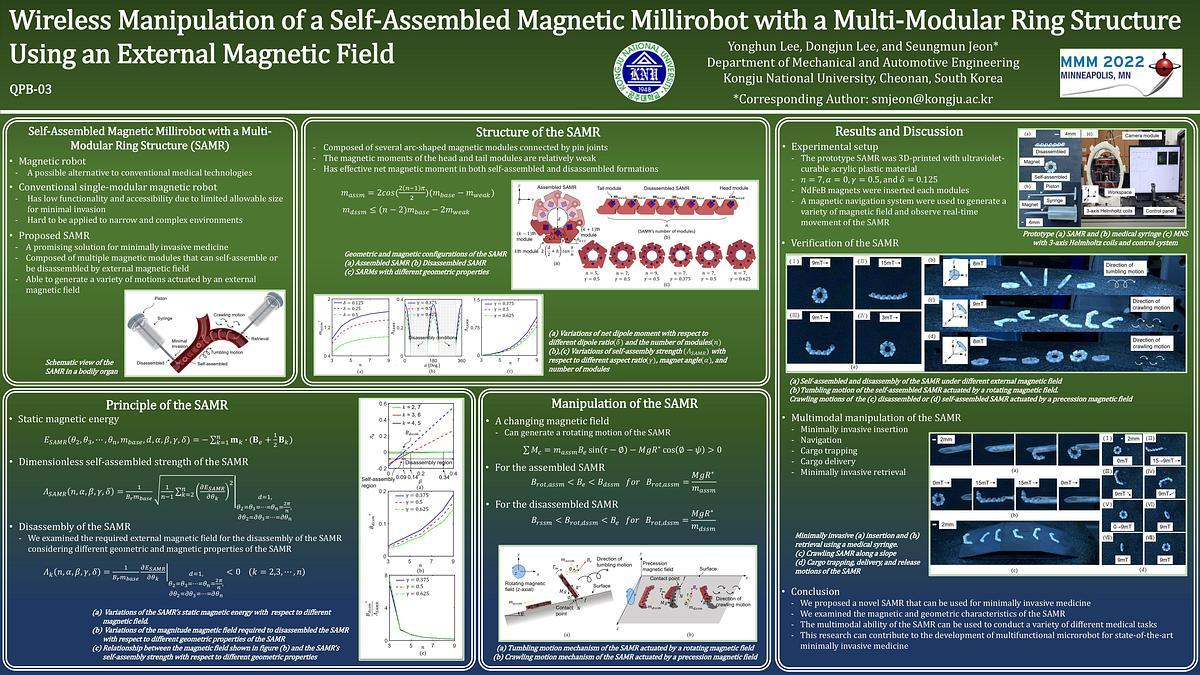
Various biomedical magnetic robots have been widely investigated as a possible means to replace conventional invasive regimens 1-3. In our previous research, we
proposed a self-assembled magnetic millirobot with a multi-modular ring-like chain structure (SAMR) that can change its equilibrium formations under different conditions 4. The SAMR
is composed of several arc-shaped modules serially connected by a pin joint, and a magnet is inserted into each module (Fig. 1). Due to the interactive magnetic forces and torques within
the modules, the SAMR can be self-assembled into a ring formation without a magnetic field or disassembled into a straight formation under an applied magnetic field. In this research, we
further investigated the wireless manipulation abilities of the SAMR’s mechanical motions. Based on the mechanical conditions of the SAMR shown in Fig. 1, we established a method that
can generate and maneuver the SAMR’s various mechanical movements, including self-assembly, disassembly, tumbling, crawling, and cargo trapping motions simply via the control of an
external magnetic field. Since such motions allow the low-invasive manipulation of the SAMR during the access to a target area and the performance of functions in the area, as shown in
Fig. 1, these motion abilities can significantly improve the SAMR’s usefulness as a minimally invasive device. In an experiment to verify the effectiveness of the proposed motion control
method, the SAMR initially disassembled and loaded inside the medical syringe successfully self-assembled into a ring formation. The SAMR then sequentially showed tumbling,
crawling, and cargo trapping and delivery motions actuated by different magnetic fields. This research can contribute to developing minimally invasive biomedical magnetic robots.
References
1 M. Sitti, H. Ceylan, W. Hu, J. Giltinan, M. Turan, S. Yim, and E. Diller, “Biomedical Applications of Untethered Mobile Milli/Microrobots,” Proc. IEEE, vol. 103, no. 2,
pp. 205-224, 2015.
2 S. Yim and M. Sitti, “SoftCubes: Stretchable and self-assembling three-dimensional soft modular matter,” Int. J. Rob. Res., vol. 33, no. 8, pp. 1083–1097, 2014.
3 H. Lee and S. Jeon, “A Study on the Self-Assembly and Disassembly Abilities of a Multi- Modular Magnetic Millirobot,” J. Inst. Cont., Rob. Sys.,” vol. 25, no. 3, pp. 235-240, 2019.
4 H. Lee and S. Jeon, “An intravascular helical magnetic millirobot with a gripper mechanism performing object delivery and collecting motions actuated by precession rotating magnetic
fields,” AIP Adv., vol. 11, pp. 025236, 2021.