Premium content
Access to this content requires a subscription. You must be a premium user to view this content.

Would you like to see your presentation here, made available to a global audience of researchers?
Add your own presentation or have us affordably record your next conference.
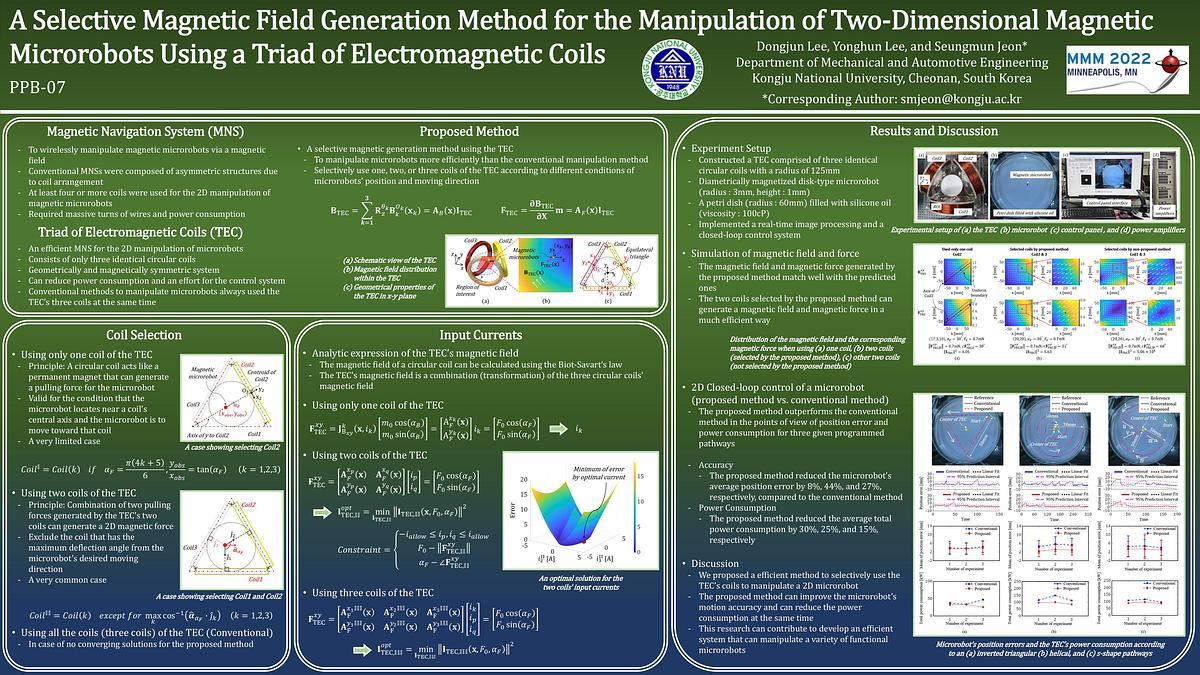
Magnetic microrobots actuated by a magnetic navigation system (MNS) have gained importance as a versatile device with minimally invasive and wireless manipulation
abilities in various biomedical applications 1, 2. Generally, MNSs are composed of multiple numbers of coils and massive turns of wires to generate a sufficiently strong magnetic field to
manipulate the microrobots’ mechanical motions. In our previous research, we proposed a geometrically compact and magnetically efficient MNS composed of a triad of electromagnetic
coils (TEC), as shown in Fig. 1 3, 4. In the TEC, there are only three control variables (three coil currents) for manipulating two-dimensional (2D) microrobots. In this research, we
investigated a new magnetic field generation method to improve the TEC’s magnetic efficiency in generating 2D microrobot motions. Based on the physical property of a magnetic coil that
acts as a pulling magnet for a microrobot, we established a process and several equations by which one can maneuver the 2D microrobot motions via the selective control of only two coil
currents of the TEC. We also employed a closed-loop controller for the method so that the microrobot can move along a programmed pathway actuated by the TEC. We then constructed an
experimental setup to demonstrate and validate the controlled motions of the microrobot using the proposed method. The experimental results shown in Fig. 2 state that the combination of
only two coils of the TEC can also generate relatively complex 2D motions of a microrobot. This research can contribute to developing an optimal MNS and strategy that can be used to
manipulate 2D magnetic microrobots for various biomedical and biological applications, including minimally invasive surgery, targeted drug and cargo delivery, microfluidic control, etc.
References:
1 L. Wang, Z. Meng, Y. Chen and Y. Zheng, “Engineering magnetic micro/nanorobots for versatile biomedical applications.,” Advanced Intelligent Systems., vol. 3, no. 9, pp.
2000267, 2021.
2 T. Xu, J. Yu, X. Yan, H. S. Choi and L. Zhang, “Magnetic actuation based motion control for microrobots: An overview.,” Micromachines., vol. 6, no. 9, pp. 1346-1364, 2015.
3 H. Lee and S. Jeon, “Two-dimensional manipulation of a magnetic robot using a triad of electromagnetic coils.,” AIP Advances., vol. 10, no. 1, pp. 015003, 2020.
4 H. Lee, D. Lee, and S. Jeon, “A two-dimensional manipulation method for a magnetic microrobot with a large region of interest using a triad of electromagnetic coils.,”
Micromachines., vol. 13, no. 3, pp. 416, 2022.