Premium content
Access to this content requires a subscription. You must be a premium user to view this content.

Would you like to see your presentation here, made available to a global audience of researchers?
Add your own presentation or have us affordably record your next conference.
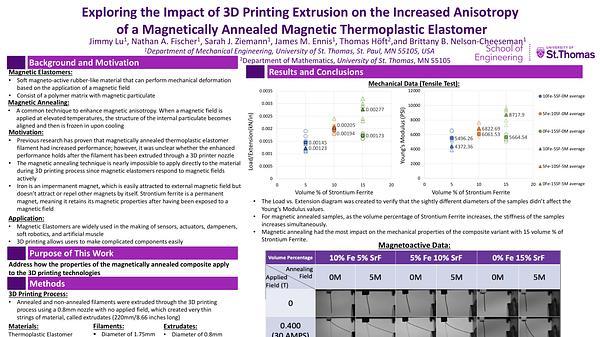
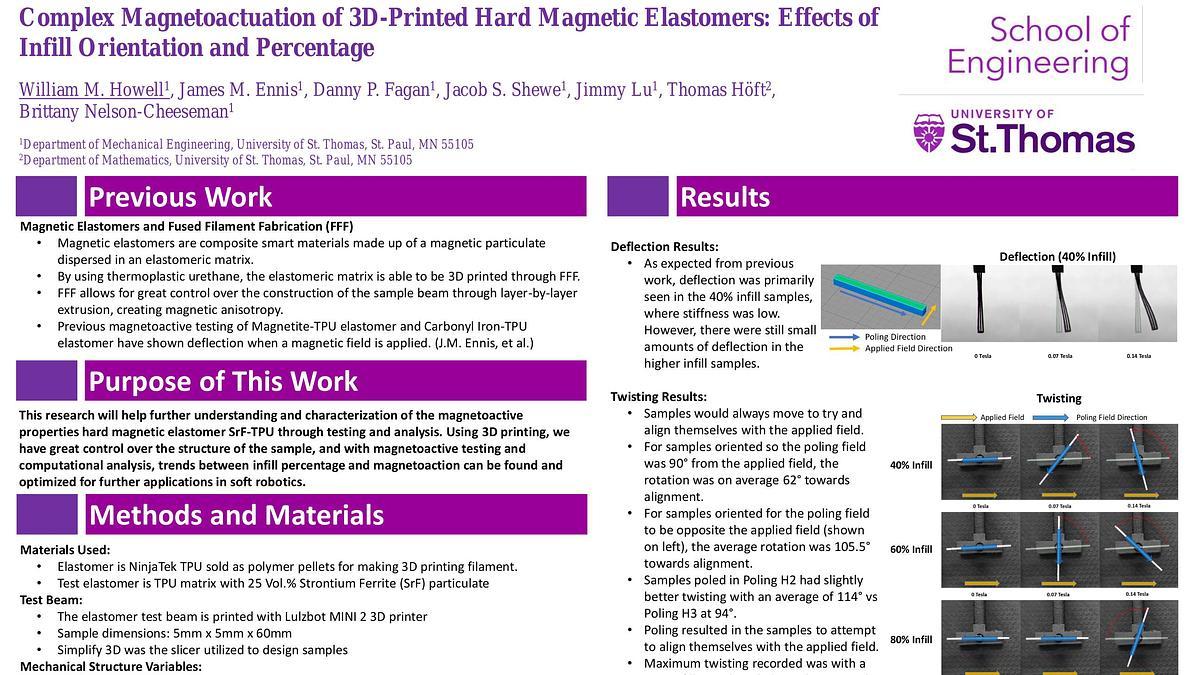
Magnetic elastomers are composite smart materials made up of a flexible polymer and magnetic particulate which mechanically actuate in response to an applied magnetic field (H). They allow for a highly configurable and untethered actuator. To enhance configurability, 3D-Printing allows for great control of the objects meso and macro structure, both in terms of shape geometry and property anisotropy. Specifically, Fused Filament Fabrication (FFF) is a process by which material is extruded in lines (infill) to gradually build up an object through layer-by-layer extrusion. In this study, we explore how multiple FFF structural parameters (infill orientation and infill percentage, and sample orientation relative to H) affect the magnetoactive response of printed Strontium Ferrite (SrF) magnetic elastomer structures. Magnetic elastomers with hard magnetic particulate have the unique advantage of performing more complex actuation, such as rolling, twisting and folding. SrF is an excellent hard magnet candidate given its lower price and greater accessibility compared to NdFeB. Magnetoactive properties are measured by a custom setup where each printed sample beam is suspended and optically tracked for a transverse H up to 0.4 T. For each sample, multiple orientations relative to H are studied. A custom program overlays the digital images for increasing H in order to quantify the magnetoactive deformation that results. The magnetoactive responses exhibited by the various sample types highlight clear design goals for tailoring large and complex magnetoactive actuation modes. In addition to the traditional transverse bending seen from typical (soft) magnetic elastomers, we also observe complex twisting and torquing of the beams in multiple dimensions based upon the printed structure and the sample orientation relative to H. These effects are greatest for the orientations and structures that maximize magnetic anisotropy and minimize the infill crosslinking. This work demonstrates the clear potential to tailor complex magnetoactive responses from FFF-printed hard magnetic elastomers, opening the door to highly complex actuators that can be readily and accessibly designed and created.