Premium content
Access to this content requires a subscription. You must be a premium user to view this content.

Would you like to see your presentation here, made available to a global audience of researchers?
Add your own presentation or have us affordably record your next conference.
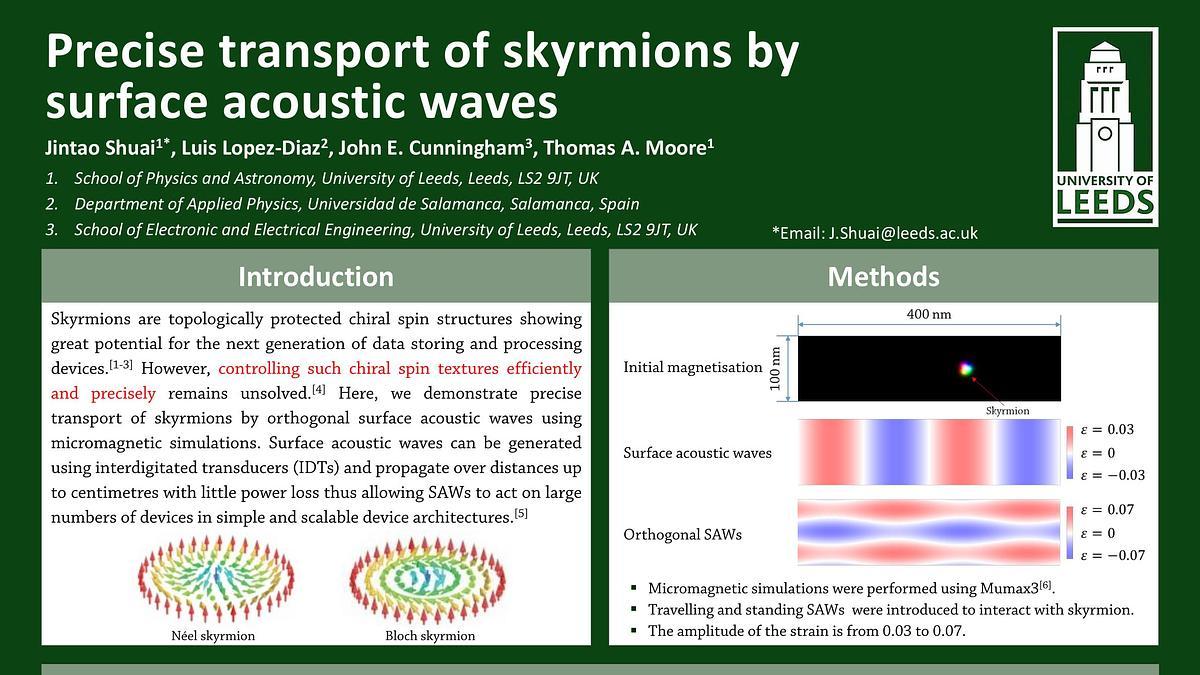
Skyrmions (Sks) are topologically protected chiral spin structures showing great potential for the next generation of data storing and processing devices.1 However, controlling such chiral spin textures efficiently and precisely remains unsolved. Here, we demonstrate precise trajectory control of Sk motion by surface acoustic waves using micromagnetic simulations (Mumax3).2 The computational region dimension was 400×100×1 nm3. The velocity, wavelength and amplitude of the SAW were 4000 m/s, 200 nm and 0.03, respectively. The Sk was initialised at different positions along the track. Results showed that with the application of the standing SAW, the Sk did not move if its initial position was at nodes of the standing SAW. Whereas starting from an anti-node, the Sk did move towards the closest node of the standing SAW (Fig.1a). The highest velocity occurs between the nodes and anti-nodes of the standing SAW, where the strain gradient is the highest, indicating that the strain gradient is the origin of the SAW-driven Sk motion.3 The Sk moves continuously in the presence of the travelling SAW regardless of its initial position with a higher velocity (2.3 m/s) than that of the standing SAW-induced (average of 0.3 m/s) Sk motion (Fig.1b). This is due to the travelling SAWs providing a constant driving force to the skyrmion. The skyrmion also moves in the vertical direction owing to its chirality (Fig.1c). Horizontal travelling SAWs together with vertical standing SAWs were then applied to the Sk (Fig.1d), which can drive Sk motion and pin the Sk in the desired trajectory, respectively. Results showed that in the presence of both SAWs, the Sk moved along the centre of the nano-track with very limited vertical motion (Fig.1d to f). This study indicates the possibility of energy-efficient and precise control of skyrmion motion.
References
1 Parkin et al. Science, 320(5873), 190-194 (2008)
2 Vansteenkiste et al. AIP Advances 4, 107133 (2014)
3 Nepal et al. Appl. Phys. Lett. 112, 112404 (2018)

Fig. 1 Skyrmion motion in the horizontal direction with standing (a) and travelling (b) SAW. (c) Spatial strain profile at 0 ns, skyrmion position at 0 to 16 ns, respectively. Skyrmion
motion in horizontal (d) and vertical (e) direction with horizontal travelling SAW and vertical standing SAW. (f) Spatial strain profile at 0 ns, skyrmion position at 0 to 6 ns, respectively.
